人の手の優しさで選果、箱詰めができるロボットは、
サイバー空間とフィジカル空間をつなぐ架け橋となる
収獲と出荷は、農家にとっては1年の苦労が収入になる喜びの作業だ。しかし、出荷時の選別と箱詰め作業は人手が頼りで、先の大粒完熟イチゴではないが、人の手が触れることで劣化が始まりもする。
 慶應義塾大学 理工学部
慶應義塾大学 理工学部野崎貴裕 専任講師
「ならばロボットはどうか」と誰もが思う。実際、すでにロボットは導入されている。しかし、工業部品などと違い、収穫物は大きさや表面の柔らかさなど個体差が大きく、1個ずつつかみ方や力を変えてやらなければ収穫物を傷つけてしまう。
例えばみかんの選果ロボットでは、個体にパッドを当てて空気を抜く吸引型のハンドが使われていた。しかしこれでは、上半分が腐っているみかんは下半分がちぎれてしまったり、果肉が吸引ホースに詰まるなど、作業の正確さとメンテナンスに大きな壁があった。
「それならば、この技術ではどうか」と注目されたのが、農業とは縁もゆかりもなかった最先端のロボット技術である「リアルハプティクス」だった。ハプティクスとは、「触覚学」という意。農業用の機械システムメーカーであるシブヤ精機を代表機関にして始まったのが「高度インテリジェントロボットハンドによる自動箱詰めの実現」プロジェクトで、技術開発を支えたのが慶應義塾大学理工学部ハプティクス研究センターだった。
そもそも研究センターでは、人がものをつかんだり放したりする感覚(力触覚)を数値化し、遠隔地に伝える研究をしている。例えば、建設重機を遠隔操作する際に、シャベルがつかんだ岩石の重さや固さをオペレーターが実感できるようにする。
自分の周りにはない風景を見たり(視覚)、音楽を聴いたりする(聴覚)ことの伝送はすでに実現しているが、嗅覚や味覚、触覚の伝送は、まだ実現していない。特に触覚の伝送は重要であり、実現できれば、外界を物理的に変化させられる。
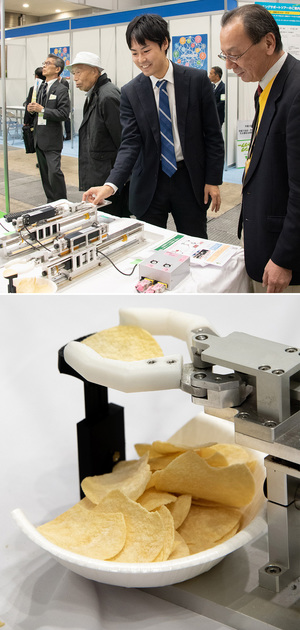 薄いポテトチップスも硬さと形をリアルハプティクスが読み取り、割らずにつかむ
薄いポテトチップスも硬さと形をリアルハプティクスが読み取り、割らずにつかむ
プロジェクトの研究を主導する野崎貴裕・慶應義塾大学理工学部専任講師は、「リアルハプティクス技術を活用することで物体に高度に適応してサイズや糖度、硬度などを判定できるロボットハンドを開発しようとしています。具体的には軟弱で複雑な形状のために従来型のロボットでは活用しにくかったイチゴやトマト、モモなどの選果や箱詰めの自動化を目指しています」と説明する。
基本原理は、モーターの回転の変化に応じてロボットの力加減を調整することだ。次のような経験は誰にでもあるだろう。例えば、弱い力で回るモーターの軸に指を押しつけるとモーターの回転が止まることがある。この止まった瞬間の力(トルク)と押し込んだ変位量との関係こそ、収穫物(個体)が持っている固さや形のデータに他ならないのだ。それを瞬時に読み取り、ハンドのつかむ力加減やつかみ方を決める。
「開発した装置は、モーターのトルクに着目して制御しているので高額な力センサーなどを使っていません。つまり安価で、壊れにくく、それでいて高性能なのです」(野崎講師)
それは各種のセンサーを加えていけば、糖度や固さ、さらに表面の傷の有無なども容易に分かり、きめ細やかな選果と箱詰め、収穫ができるようになるということでもある。
「今回の開発では、リアルハプティクスによってフィジカル空間とサイバー空間がつながり、新たな仕事の仕方が可能になるということを実証できました。農家や畑ごとの収穫物の個体差などをデータベースにすれば、さらに人の作業に負けない優しくて付加価値の高い作業を実現できるでしょう」(野崎講師)