長梢棚と垣根のいいとこ取りを目指す
 ぶどう栽培の専門家であるサントリーワインインターナショナルの棚橋博史氏は、「MY DONKEY」などの省力化機器の活用により、体が不自由な方でもぶどう栽培に取り組める環境が生まれてきます。こうした方たちの就労機会の拡充はスマート農業の秘められた大きな可能性の一つと感じます」と語る
ぶどう栽培の専門家であるサントリーワインインターナショナルの棚橋博史氏は、「MY DONKEY」などの省力化機器の活用により、体が不自由な方でもぶどう栽培に取り組める環境が生まれてきます。こうした方たちの就労機会の拡充はスマート農業の秘められた大きな可能性の一つと感じます」と語る
多くの人にぶどう栽培のイメージを聞けば、棚に梢(こずえ)が伸び、ぶどうの房がぶら下がり、茎を切って収穫する姿を思い浮かべるだろう。この、梢を伸ばす栽培方法を「長梢(ちょうしょう)棚栽培」といい、日本の伝統的な栽培法であり、収穫量を多くできるのが特徴だ。ただ剪定や収穫などの作業では、上を向く姿勢になるので作業効率は悪く、生産者の体への負担も大きい。だからこそ生産者が高齢化すると収穫量も減る。
一方、醸造用ぶどうの栽培では、梢を伸ばさず、ぶどうの木を垣根のように剪定して実らせる「垣根式栽培」も多くみられる。長梢棚栽培に比べて収穫量は劣るが、剪定や収穫作業を省力化でき、何よりも作業が楽である。
「コンソーシアムが目指すのは『日本式醸造ぶどう栽培体系』と表現してよいものです。長梢棚の長所に加え、垣根式栽培のような省力化された楽な作業が可能となるぶどう栽培。いわば両者のいいとこ取りによるハイブリッド栽培法の確立を狙っています」(高谷課長)
そんな虫のいい話が可能なのか。実現するために投入されているのが「7つの要素技術」である。つまり、①栽培管理アプリケーション、②作業支援ロボット、③簡易気象計・土壌センサー、④点滴灌(かん)水、⑤根圏制御栽培、⑥画像認識、⑦生育シミュレーションだ。
 “主役”ともいえる自律多機能型農業ロボット「MY DONKEY」。マニュアル、追従、自律移動の3つの走行パターンがあり、さまざまな作業に応じたアタッチメントを装着できる
“主役”ともいえる自律多機能型農業ロボット「MY DONKEY」。マニュアル、追従、自律移動の3つの走行パターンがあり、さまざまな作業に応じたアタッチメントを装着できる
 日本総合研究所はプロジェクトの取りまとめと「MY DONKEY」の開発を担う。同社創発戦略センターの前田佳栄氏(写真)は、「産業インキュベーションのために、シンクタンクとしての知見を提供し、『Do Tank』として農業の新しい展開に参加できるのはやりがいに満ちています」と語る
日本総合研究所はプロジェクトの取りまとめと「MY DONKEY」の開発を担う。同社創発戦略センターの前田佳栄氏(写真)は、「産業インキュベーションのために、シンクタンクとしての知見を提供し、『Do Tank』として農業の新しい展開に参加できるのはやりがいに満ちています」と語る
『日本式醸造ぶどう栽培体系』を目指した実証事業を実現させていく上で大きな役割を担うのが自律多機能型農業ロボット「MY DONKEY」である。スマートフォンでのマニュアルや自動追従、さらにルート設定による自律移動という3つの走り方ができる。例えば収穫時には籠を載せ、作業者に追随してぶどうを積む。この際、重量計とGPSセンサーが連動し、圃場の位置(木)ごとの収穫量は幾らであったかを自動的に作業日誌などに反映する。収穫分析のための基礎的なデータを提供するのだ。
「MY DONKEY」は、日本総合研究所が慶應義塾大学などの協力を得て開発を進めているもので、アタッチメントを換えることでさまざまな農作業を支援しようとしている。
収穫量の予測にも「MY DONKEY」は活躍する。装備されているカメラやアタッチメントで装着するカメラで収穫前のぶどうを撮影し、その画像データから「房の大きさ」や「房の数」などを読み取り、特殊な体積アルゴリズムから収穫重量を予測するのである。生産者が収穫を見込む2週間ほど前に投入して予測作業を行うが、「単なる収穫予測にとどまらず、醸造場の作業計画の策定に貢献できる仕組みをつくる」(日鉄ソリューションズ)との狙いもある。「一貫体系」のための工夫が、こうした部分にも盛り込まれている。
 殺菌剤などを散布するリモコン操縦式の台車。葉の表、裏など散布のむらをなくすように散布の圧力や散布アームの角度を変えられる
殺菌剤などを散布するリモコン操縦式の台車。葉の表、裏など散布のむらをなくすように散布の圧力や散布アームの角度を変えられる
圃場内で移動してぶどう撮影を行うため運用されているのがリモコン式の操縦台車である。この台車は既存の電動車いすをベースとしているため、簡易で安価、かつ安全なのが魅力である。
また、こちらを利用して先行して殺菌剤や殺虫剤などを散布するアタッチメントの検討を進めていて、両手を広げたように2メートルの散布アームが伸びて先端ノズルから散布する。棚の梢の勢い(形状)に応じて散布アームを三角屋根のように傾けることができ、むらなく薬剤を散布できるようになっている。この検討されたアタッチメントが改良されてMY DONKEYに装着され,設定したルートを自動散布できるようになる計画である。
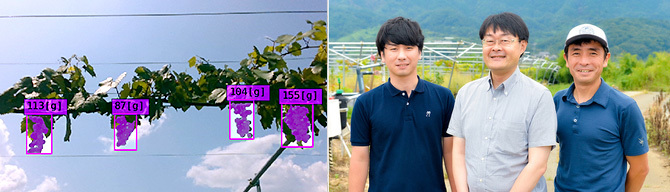 (左)収穫量予測のための画像処理システム。房の大きさなどから収穫量を予測するアルゴリズムを開発した(画像提供/日鉄ソリューションズ)
(左)収穫量予測のための画像処理システム。房の大きさなどから収穫量を予測するアルゴリズムを開発した(画像提供/日鉄ソリューションズ)(右)日鉄ソリューションズIoXソリューション事業推進部の面々。写真左から德竹眞人氏、飯田健一郎氏、高畑紀宏氏