ハイパーモードは1馬力、エコモードは20~50%アシスト
Hypershell Pro Xには、エコモードとハイパーモードがあり、ハイパーモードでパワーを100%にすると1馬力のアシスト量になる。実際に、モード変更やパワーレベルを色々と変更して試してみたが、ハイパーモードにすると本当にグイグイとアシストが働き、今回のようなコースではやや過剰に感じられるほど。市街地ではエコモードのデフォルトの25%から50%程度でも十分な印象だ。
ハイパーモードは、登山やトレッキングで、石や岩が積み重なったガレ場を登るような状況でこそ威力を発揮するものだろう。カジュアルユースであれば、ハイパーモードがなく最高出力がPoro XやCarbon Xの半分になるエントリーモデルのGo Xでも実用上の問題はないと思われる。
今回のテストでは、同じコースをアシスト量をエコモードの50%の状態と、アシストなしの状態とで2回歩いて、比較することにした。歩き出して、まず意外だったのはその静音性だ。映画などのロボットの効果音ではないが、何らかのギア鳴りのような音がするものと思っていたものの、金属部分に直に耳を当てない限り、事実上は無音といえる。これならば、人混みの中で使っても迷惑とは思われないだろう。
アシストありの場合には、最初の坂の登りはじめから足の筋力の負荷が減っていることを実感する。もちろん、足が勝手に動くことはなく、自分で動かしたことをセンサーが感知してアシストがかかる。この点は電動アシスト自転車と同じだ。
センサーが感知して、上り、下りに適したアシストをする
HypershellではAIによって運動の種類が自動判別され、ウォーキングやアセンディング(登り)、ディセンディング(下り)など状況に応じてパワーの増減が行われる。つまり、エコモードの50%で設定してあっても、上りではパワーが増やされ、下りでは減じられる細かなコントロールによって、モーターの力が無駄なく生かされる仕組みになっているわけだ。
したがって、下りの階段やスロープではほとんどアシストを感じなくなるが、トレッキングなどではHill Descent Controlという機能をオンにしておくと、下りで足を止める方向にパワーをかけることもできるようになっている。これは、ひざの負担を減らして安全に降りられるようにするためのもので、まだ実験的な実装だが、歩行に不安のある人にとっても有効な機能といえるだろう。
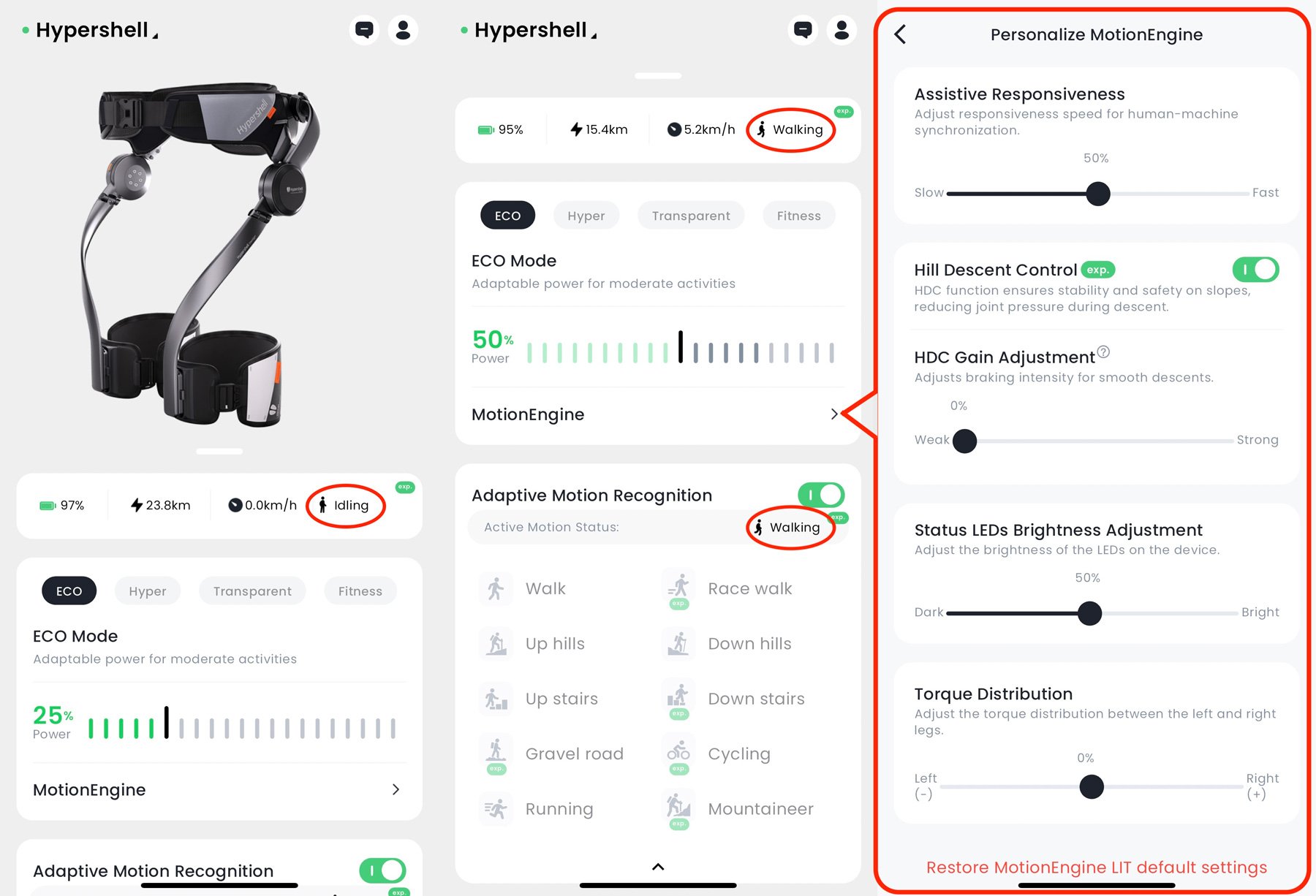 専用アプリの画面では、赤丸のように運動の種類が自動判別され、それに適したパワーのかかり方がリアルタイムでコントロールされていることがわかる。これはHypershellの状態を示すもので、アプリ側でコントロールしているわけではない。MitionEngine設定を開くとより細かな設定が行えるほか、下りでひざの負担を減らすHill Descent Control機能もある 拡大画像表示
専用アプリの画面では、赤丸のように運動の種類が自動判別され、それに適したパワーのかかり方がリアルタイムでコントロールされていることがわかる。これはHypershellの状態を示すもので、アプリ側でコントロールしているわけではない。MitionEngine設定を開くとより細かな設定が行えるほか、下りでひざの負担を減らすHill Descent Control機能もある 拡大画像表示