信号システムが自動で
速度を制御するCBTC
これに対してCBTCは、各車両に設置した速度発電機と、位置補正用の地上子を併用して走行速度と走行距離を算出し、これを地上無線機経由で後続列車に送信する。後続列車は先行列車との距離、カーブやポイントなど走行位置に応じた速度信号を自ら生成し、運転台の車内信号機に表示。制限速度を超えたり、先行列車に接近したりした場合は自動的にブレーキをかけることで安全を確保する。
軌道回路は大雑把な在線位置しか分からなかったが、CBTCは安価でシンプルな仕組みながら、より細かい走行位置を常時把握できるため、コスト削減のみならず、安全性向上や遅延回復力向上が期待できる革新的なシステムである。
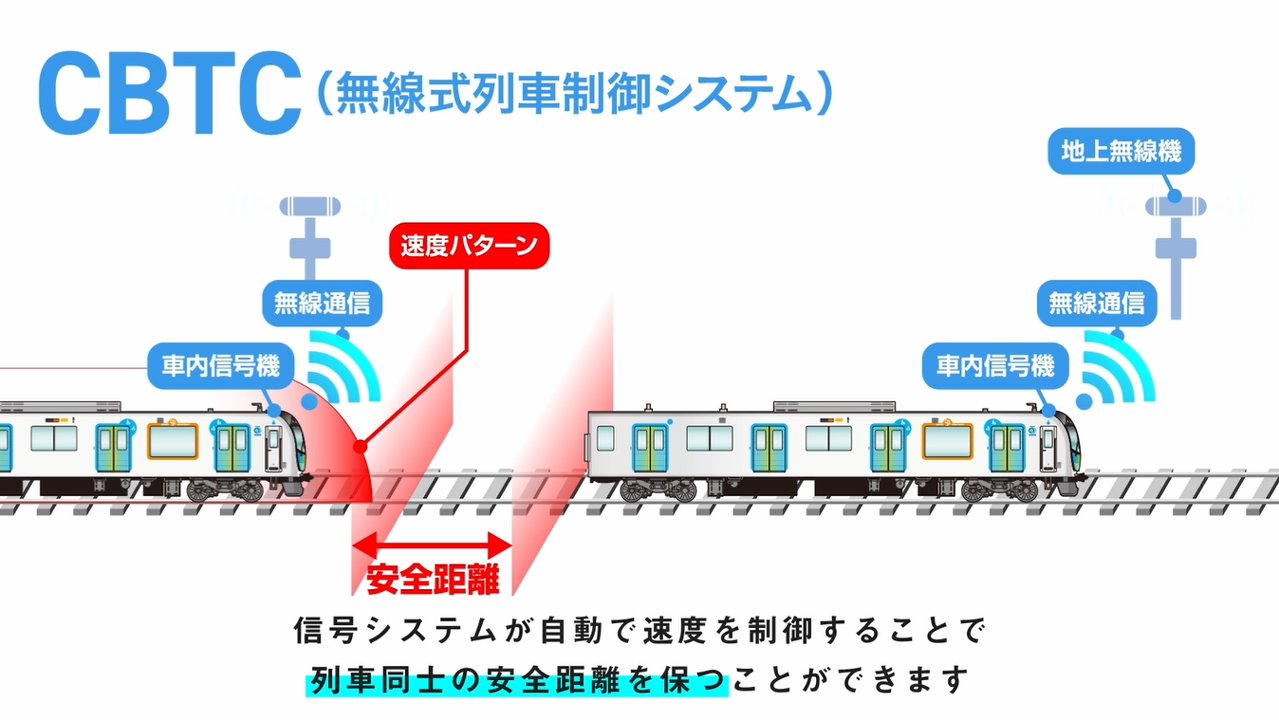 図3:無線通信で列車の走行位置を把握し、列車同士の安全距離を確保する(西武鉄道提供) 拡大画像表示
図3:無線通信で列車の走行位置を把握し、列車同士の安全距離を確保する(西武鉄道提供) 拡大画像表示
他にもさまざまなメリットがある。例えば踏切の警報機鳴動と遮断のタイミングも軌道回路を用いて判断しているが、通過列車と停車列車、特急と各駅停車など、列車ごとに通過速度が異なる場合は最速列車に合わせるので、待ち時間が長くなる。
CBTCを用いれば、踏切が列車の走行位置を正確に把握できるため、遮断時間を最小化できる。これまで故障などで遮断機が下りない場合や踏切内に支障物がある場合は、運転士が特殊な信号を視認して手動でブレーキをかけていたが、CBTCであれば踏切手前で自動的に停車させることが可能だ。これらは既存システムの高度化でも実現できないことはないが、はるかにシンプルかつ高性能な形で実装できるのが強みだ。
また、軌道回路は信号機の設置方向が決まっているため走行方向が一定だが、CBTCは地上施設に縛られないため反対方向に走行できる。これにより運転見合わせ時に片側の線路を双方向に使って運行継続が可能になるなど、運行の自由度が飛躍的に向上する。