ヒューマノイドが
最も頭を使う作業とは
――HRP-5Pはどこまで自分で考えて作業をしているのですか?
「基本的には、5Pは自律的に判断して行動しています。こちらとしては、台の上にある石膏ボードを持って、あそこの壁に打ちつけよ、といった大まかな指示を最初に与えているだけです」
――あの作業で一番頭を使うのは、どうやって台の上のボードをつかむか、ではないかと思いますが、そこも5Pが自分で考えているのでしょうか?
「ボードのつかみかたに関しては、僕らがまず考えて、シミュレーターで検証したうえで、一番よいと思われるやりかたを教えてあります。作業方法を考えるときに、人間が自分の身体感覚に頼りながら考えられるのは、ヒューマノイドのとても便利なところです」
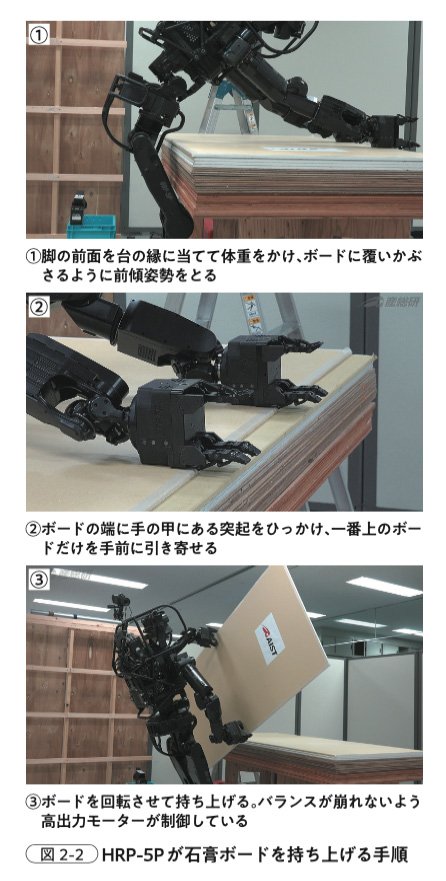
5Pは台の上にある石膏ボードを持ち上げるために、まず、脚の前面を台の縁に当てて体重をそこにかけるようにしながら、ボードの上に覆いかぶさるような前傾姿勢をとる。次に、自分から遠いほうのボードの端に、手の甲に当たる部分にある突起をひっかけて、一番上のボードだけを手前に引き寄せている。
 同書より転載 拡大画像表示
同書より転載 拡大画像表示
そうすることで、一番上のボードだけが手前にずれて、そのボードがつかみやすくなるのだ。
ボードの重さだけでなく、作業台の位置や高さなど、さまざまな要素に多少の想定違いがあっても、5Pはその場で、自身で判断して対応できる。あらかじめプログラムされた行動を機械的に再現しているだけではないのだ。
5Pを見ていて「人間っぽさ」を感じるところの一つに、工具を手に持って働いているという点がある。
 同書より転載 拡大画像表示
同書より転載 拡大画像表示
開発者たちが苦難の末に実現
「ビスをまっすぐ留められる」
ロボットだったらドライバーやドリルが必要に応じて身体からニョキッと出てきてもよさそうだが、“彼”は人間がするように、工具を箱から取り出して使っている。ロボットを広い意味で「道具」と呼んでいいなら、道具が道具を使う、というちょっと不思議な状況になっているのだ。